Change Language :
Soutien & Service
Télécharger
Catalogues, données techniques et données 3D
Aller aux téléchargementsFAQ
Foire aux questions
Aller aux questions & RéponsesRobolink - Téléchargements
Vous trouverez ici un aperçu de tous les téléchargements de Robolink.
Données techniques
Documents techniques
| Documentation technique générale de Robolink (anglais) | Instructions d'installation pour le fond du câble Robolink (anglais) |
|---|---|
| Documentation-robolink-kit-FR.pdf | instruction_serrage_des_fils.pdf |
| Instructions d'installation de la roue d'entraînement extensible Robolink (anglais) | Codeur AS5304 technical data (anglais) |
| Instructions de montage_robolink-cable-end-bottom.pdf | Encoder_AS5304_Datasheet.pdf |
| Caractéristiques techniques des capteurs Honeywell Hall (anglais) | Fiche technique Dyneema (anglais) |
| Capteur_Hall_SS443A-Honeywell.pdf | Dyneema_data_sheet_fr.pdf |
| Affectation du câble du capteur (anglais) | Fiche technique du moteur (anglais) |
| Configuration_sensorline_fr.pdf | Motordatasheet_FR.pdf |
| Schéma des connexions & sensors (anglais) | Câblage et passage des câbles (allemand) |
| Plan d'action Capteurs_en.pdf | Durchfuerung_von_Zugseilen_durch_ein_Gelenk_de.pdf |
| Fiche technique E-Gripper (allemand / anglais) | Fiche technique E-gripper (allemand/anglais) |
| fiche technique E-gripper_2-jaw_de-fr.pdf | fiche technique_E-gripper_3-mâchoires_de-fr.pdf |
Dessins techniques
| Joint RL-50 | Joint RL-50-GA2 |
|---|---|
| 1xRL-50.pdf | 2xRL-50.pdf |
Logiciel de commande : IME igus® motion editor for Robolink
Logiciel de contrôle simple et intuitif pour la programmation de diverses configurations de bras articulés. Manuel de démarrage rapide (PDF) inclus dans le répertoire.
Modules articulés Robolink pour robots - Foire aux questions
Quelles sont les versions de joints disponibles en stock?
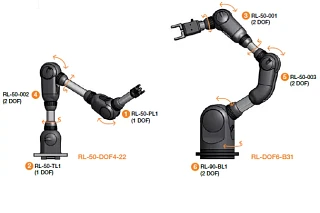
Il existe actuellement 6 articulations standard différentes
1 - RL-50-PL1 : strictement une articulation pivotante
2 - RL-50-TL1 : strictement une articulation rotative
3 - RL-50-001 : une articulation à 2 axes avec une plage de pivotement de +/-90° ("THE classic")
4 - RL-50-002 : une articulation à 2 axes avec une plage de pivotement de +130°/-50° ("asymétrique")
5 - RL-50-003 : une articulation à 2 axes avec une plage de pivotement de +180°/0° ("fold-in motions")
6 - RL-90-BL1 : articulation de base à 2 axes, ("plus grande et plus puissante")
Des versions personnalisées des articulations sont également disponibles sur demande.
Quelles sont les positions angulaires possibles? Poids morts? Le couple?
La liste suivante fournit de l'information de base. Ce tableau figure également dans notre catalogue.
| Numéro de commande | Nombre de cordes | Angle de pivotement | Angle de rotation | Poids | Charge max. Charge | ||||
|---|---|---|---|---|---|---|---|---|---|
| Entraînement embarqué | Passage optionnel | Standard (avec chien d'arrêt) | Option (*sans chien d'arrêt) | Standard (avec chien d'arrêt) | Option (*sans chien d'arrêt) | [gr] | Pivotement (Nm) | Rotation (Nm) | |
| 1. Joint pivotant RL-50-PL1 | 2 | 4 | 180° (±90°) | 210° (±105°) | - | - | 235 | 12 | - |
| 2. joint tournant RL-50-TL1 | 2 | 8 | - | - | 340° (±170°) | 540° (±270°) | 245 | - | 5 |
| 3. Joint à 2 axes RL-50-001 | 4 | 4 | 180° (±90°) | 210° (±105°) | 340° (±170°) | 540° (±270°) | 345 | 12 | 5 |
| 4. Articulation à 2 axes RL-50-002 | 4 | 4 | 180° (+130°/-50°) | 240° (+135°/-105°) | 340° (±170°) | 540° (±270°) | 345 | 12 | 5 |
| 5. Articulation à 2 axes RL-50-003 | 4 | 4 | 180 ° (+180°/0°) | 235° (+180°/-55°) | 340° (±170°) | 540° (±270°) | 400 | 12 | 5 |
| 6. Joint de base RL-90-BL1 | 4 | 8 | 180° (±90°) | 190° (±95°) | 180° (±90°) | - | 120 | 20 | 10 |
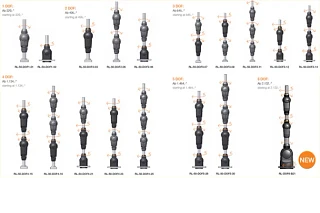
Comment combiner les joints?
Chaque articulation est équipée de fils de tirage. Ceux-ci doivent être guidés à travers le joint situé en dessous. Cette exigence limite les combinaisons d'articulations possibles. Cependant, il est possible de combiner des bras articulés individuels avec 1 à 6 DOF et de rendre une variété de cinématiques. Nous nous ferons un plaisir de vous conseiller. Le schéma suivant montre une combinaison possible - d'innombrables autres options sont disponibles avec les nouveaux types d'articulations RL-50-003 et RL-90-BL1!
Qu'entend-on par "Système de trousse de construction"?
L'idée sous-jacente de la trousse de construction Robolink est que nos clients ont accès à des composants (mécaniques) individuels qui peuvent être utilisés pour construire un système robotique. En fonction de la complexité et des exigences, les bras articulés peuvent être configurés et commandés avec différentes complexités. igus® construit les bras selon les spécifications du client et du livre des unités prêtes à être raccordées. Il n'est toutefois pas possible de raccorder des articulations individuelles ("comme avec LEGO®" ).
Pourquoi n'est-il pas possible de reconfigurer simplement les bras articulés sans soutien?

Toutes les articulations sont actionnées par des fils de tirage. 2 fils sont nécessaires par degré de liberté (principe d'antagonisme). Si les fils de l'articulation supérieure (2) passaient par l'articulation inférieure sans guide (1), le mouvement des deux articulations ne serait plus indépendant l'un de l'autre. Pour obtenir cette indépendance, il est nécessaire de découpler la tension des fils de l'articulation supérieure (2) des mouvements de l'articulation inférieure (1). Pour ce faire, un système spécial de câbles Bowden est installé dans l'ouverture de l'articulation inférieure (voir figure). Les câbles se déplacent ensuite indépendamment l'un de l'autre dans les tubes de connexion entre les articulations.
Lors de la commande de systèmes multi-axes auprès d'igus®, tous les éléments du système de câbles Bowden sont préassemblés et le système complet est toujours livré prêt à être installé avec tous les fils et avec tous les tubes dans la configuration spécifiée.
- Tuyau pneumatique (pince)
- 4 x système de câble Bowden
- Câble du capteur - joint 2
- 4 fils se déplacent librement dans le tube
- Système de câble Bowden individuel pour la rotation
- 8 fils circulent librement dans le tube
Quelle est la course des fils et quelles sont les forces nécessaires pour déplacer les articulations?
Le point d'attaque des fils à l'intérieur de l'articulation est défini par la spécification de taille :
RL-50 : Diamètre effectif : 50 mm (mouvement de rotation et de pivot)
RL-90 : diamètre effectif : 90 mm (mouvement de pivotement) ou 120 mm (mouvement de rotation).
La course du fil sur une articulation RL-50 est donc calculée comme suit
π x d/4 ≈ 39 mm pour un mouvement angulaire de 90°.
π x d/2 ≈ 79 mm pour un mouvement angulaire de 180°.
Les forces de traction du câble (en fonction du couple appliqué) peuvent atteindre 600 N.
Qu'est-ce qui est compris dans la livraison d'une articulation?
- Articulation assemblée, fabriquée en (PA 2200), y compris les emplacements des roulements (aluminium anodisé dur = standard)
- Fils Dyneema®
- Tiges en aluminium (standard = 100 mm respectivement inclus, longueurs personnalisées sur demande)
- Capteurs d'angle en option (-WS), câble de capteur de 3 m, assemblé et testé. Nipple en fil métallique comme matériel de connexion, sans frais selon consultation.
Qu'est-ce qui est inclus dans la livraison d'un bras articulé?
- Toutes les articulations sont pré-assemblées conformément au point 7)
- tous les câbles acheminés à l'aide de segments Bowden spéciaux, conformément au point 5)
- Tubes en aluminium entre les articulations, adaptés aux spécifications du client
- Plaque de montage à la base du bras
- Câbles de capteur acheminés (option -WS), respectivement 3 m de câble de capteur assemblés et testés. Nipple en tant que matériel de connexion, sans frais sur la base d'une consultation.
Qu'est-ce qui est inclus dans la livraison d'un système complet "" ?
Articulations telles que décrites à la question 6), mais avec une unité d'entraînement MIT supplémentaire, composée de :
- moteurs pas à pas igus®, dont le nombre correspond au nombre d'axes du bras
- Engrenage planétaire pour chaque moteur
- "Roue d'entraînement" pour connecter les fils à l'entraînement
- "Outil de tension" pour retendre facilement les roues d'entraînement
- Boîtiers dans lesquels les moteurs sont assemblés et sur lesquels le bras est construit - dans différentes configurations
le tout complètement assemblé, pré-tendu et testé.
NON inclus :
- Les pinces (disponibles en option auprès d'igus®, d'autres produits peuvent également être adaptés).
- Composants de commande
- Câbles d'alimentation (disponibles en option sur le site Web igus®)
Quels sont les capteurs d'angle utilisés?

Les articulations sont équipées (en option) de capteurs angulaires incrémentaux d'Austriamicrosystems (AS5304A). Les encodeurs absolus ne sont actuellement pas techniquement possibles. La position d'origine est définie à l'aide d'un capteur à effet Hall situé au centre du pivot ou de la plage de rotation de l'articulation. Cela signifie que chaque articulation doit d'abord être mise à l'endroit "" lorsqu'elle est mise sous tension. Pour plus d'informations sur la configuration du capteur et le passage des câbles, voir notre documentation.
La résolution de l'encodeur est la suivante (différente selon les articulations!):
- 4 640 signaux / 360° pour tous les mouvements de rotation de la taille de l'articulation RL-50
(29 paires de pôles x 160 signaux / paire de pôles) ≈ 0,078° - 4 960 signaux / 360° sur tous les mouvements de pivot de la taille de l'articulation RL-50
(31 paires de pôles x 160 signaux / paire de pôles) ≈ 0.073° - 9 920 signaux / 360° sur tous les mouvements de la taille de l'articulation RL-90 ("Base")
(62 paires de pôles x 160 signaux / paire de pôles) ≈ 0.036
Capteurs standard :
capteurs d'angle incrémentaux magnétiques. Les capteurs ont une résolution de ~0,07° par axe. Toutes les unités de capteurs sont prêtes à être installées pour les articulations respectives. Respectivement avec 3 m de câble de capteur (6 fils par DOF)
- Mouvement rotatif du capteur à effet Hall
- Mouvement rotatif du codeur
- Mouvement de pivotement du codeur
- Mouvement rotatif du capteur à effet Hall
Les bras articulés peuvent-ils également être utilisés dans l'eau?
Oui, les composants sont principalement constitués de plastique (PA2200), d'aluminium anodisé, d'acier inoxydable (vis), de fils Dyneema (PE), de nipples en laiton. Les capteurs peuvent être commandés en version étanche (-SE = encodeur étanche).


Quelles sont les versions de lecteur disponibles?

Une large gamme d'entraînements peut être utilisée pour déplacer les fils. Les options comprennent les entraînements manuels ("crank"), pneumatiques (par exemple : muscle pneumatique) ou les moteurs électriques (BLDC, DC, servo, linéaires, moteurs pas à pas). igus® propose des moteurs pas à pas avec des engrenages planétaires en tant qu'option d'entraînement. Options disponibles :
- Moteur pas à pas NEMA23 (version brin ou connecteur) avec engrenage planétaire 1:16
- Moteur pas à pas NEMA17 (version brin ou connecteur) avec engrenage planétaire 1:35
- moteur pas à pas
- réducteur planétaire
- roue d'entraînement tendue
Comment les bras articulés de Robolink sont-ils contrôlés ou manipulés?
igus® ne développe pas, ne construit pas et ne vend pas de composants de commande. L'étendue disponible d'un système Robolink est soit le bras articulé, soit le bras articulé avec l'unité d'entraînement "" .
Les composants de commande doivent être fournis ou achetés par le client.
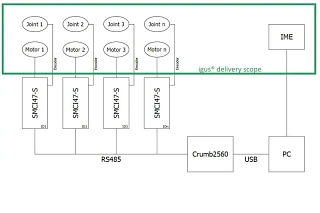
igus® propose un logiciel de commande gratuit pour les bras articulés Robolink avec nos moteurs pas à pas (open source). Il s'agit d'une plateforme logicielle intuitive et facile à utiliser pour saisir des positions angulaires et enregistrer des mouvements simples. Le logiciel n'est pas adapté pour interagir avec d'autres systèmes. Un contrôle de contour (ou cinématique inverse) n'est pas inclus. Une configuration matérielle particulière est nécessaire pour utiliser le logiciel IME (igus® motion editor). Il s'agit essentiellement de la commande de moteur pas à pas NANOTEC® (SMCI47-S2) et d'une puce ATmega Crumb2560. La puce ATmega sera disponible sur igus® au printemps 2014 (actuellement sur CHIP45 sur Internet). Les configurations suivantes sont donc nécessaires :
Que dois-je faire pour utiliser le logiciel libre IME (igus motion editor) d'igus®?
Le logiciel est disponible en téléchargement gratuit. Il s'agit d'une interface utilisateur graphique qui peut être utilisée pour programmer et conserver des mouvements simples. Un contrôle de contour (ou cinématique inverse) n'est pas inclus.
Quels sont les matériaux utilisés?
Articulations :Composants en polyamide PA 2200, vis V2A, bagues de roulement en aluminium anodisé dur, alternativement : iglide® J ou VA.
Tubes de raccordement : Aluminium anodisé, alternativement : FGC ou CFC.
**Cordes :**Fils Dyneema®, embouts en laiton.
Quelles pinces peuvent être utilisées?
"Toutes les pinces imaginables (" ) peuvent être combinées avec nos bras articulés. En raison de la capacité de charge totale relativement faible du système, les pinces doivent être aussi légères que possible. Une large gamme de pinces pneumatiques légères est disponible, par exemple chez SCHUNK, FESTO ou FIPA. Souvent, l'utilisation de pinces pneumatiques n'est pas souhaitable. Des pinces électriques très légères sont disponibles auprès de GIMATIC, SCHUNK ou SOMMER (mais elles sont toutes nettement plus coûteuses que les pinces pneumatiques simples). Depuis 2013, igus® propose des préhenseurs simples en plastique, dont le moteur électrique est placé dans le tube Robolink. Dans ce cas, les patins de préhension peuvent également être personnalisés en option.
Quel est le prix des articulations ou des systèmes "" ?
Tous les prix des articulations et des systèmes individuels sont indiqués dans notre catalogue. En règle générale, un système complet "" avec moteurs, engrenages, boîtiers, articulations et capteurs coûte un peu plus de 1 200,00 $ par axe. Par exemple, environ 7 200 $ pour un système à 6 axes. Un bras articulé SANS moteurs (mais avec des capteurs) coûte environ la moitié (par exemple 600,00 $ / axe). Exemple :

